
1.环境搭建
1.1 电路模拟环境+3D建模环境
-
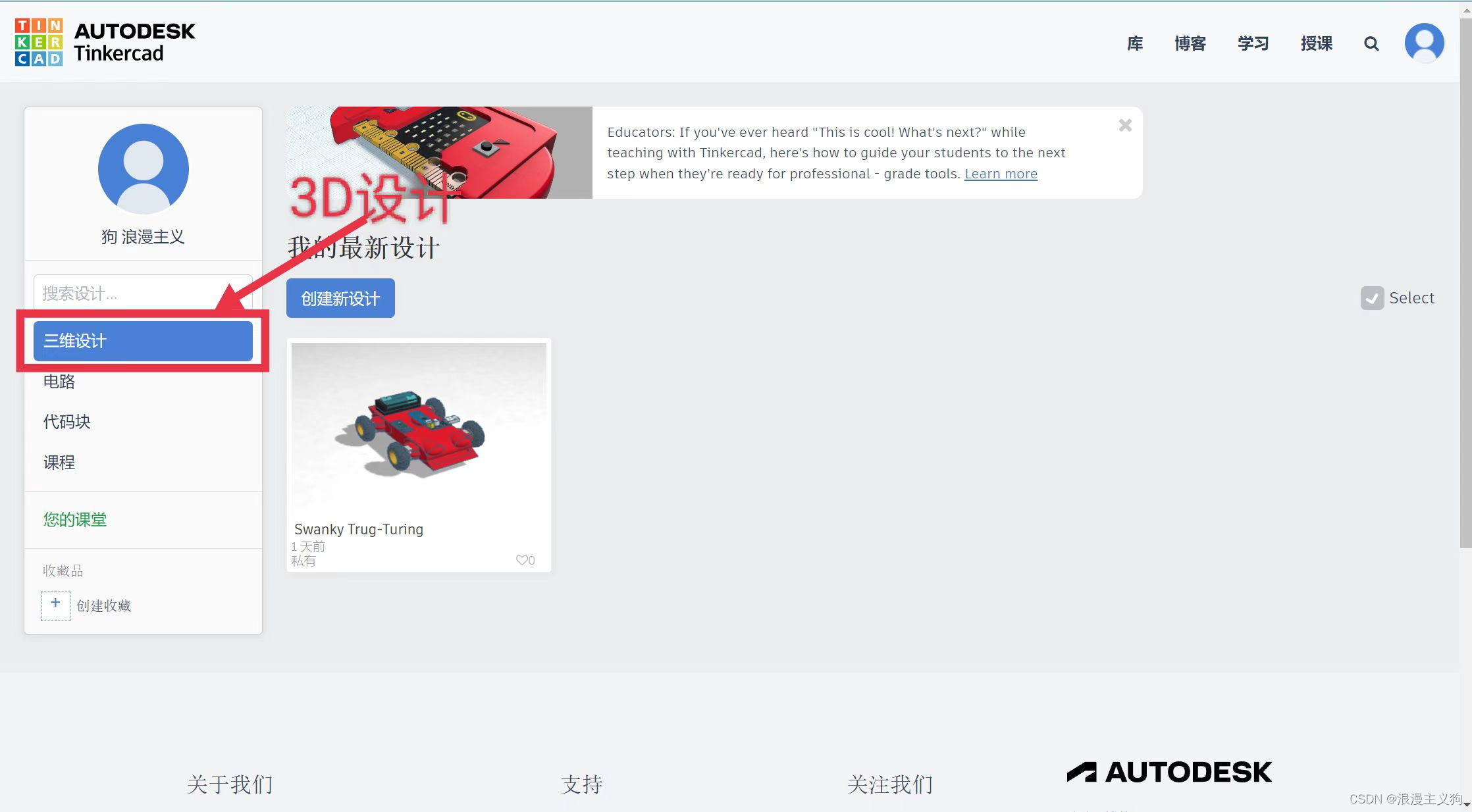
使用老师提供的网站:AUTUDESK
-
在该网站注册账号即可免费使用,可以最低限度满足本次项目要求
使用说明
- 电路模拟
- 点击创建新电路

- 选择相应组件组合即可
- 点击创建新电路
- 3D建模
- 点击创建新设计\
- 选择合适的3D组件组合即可
- 点击创建新设计\

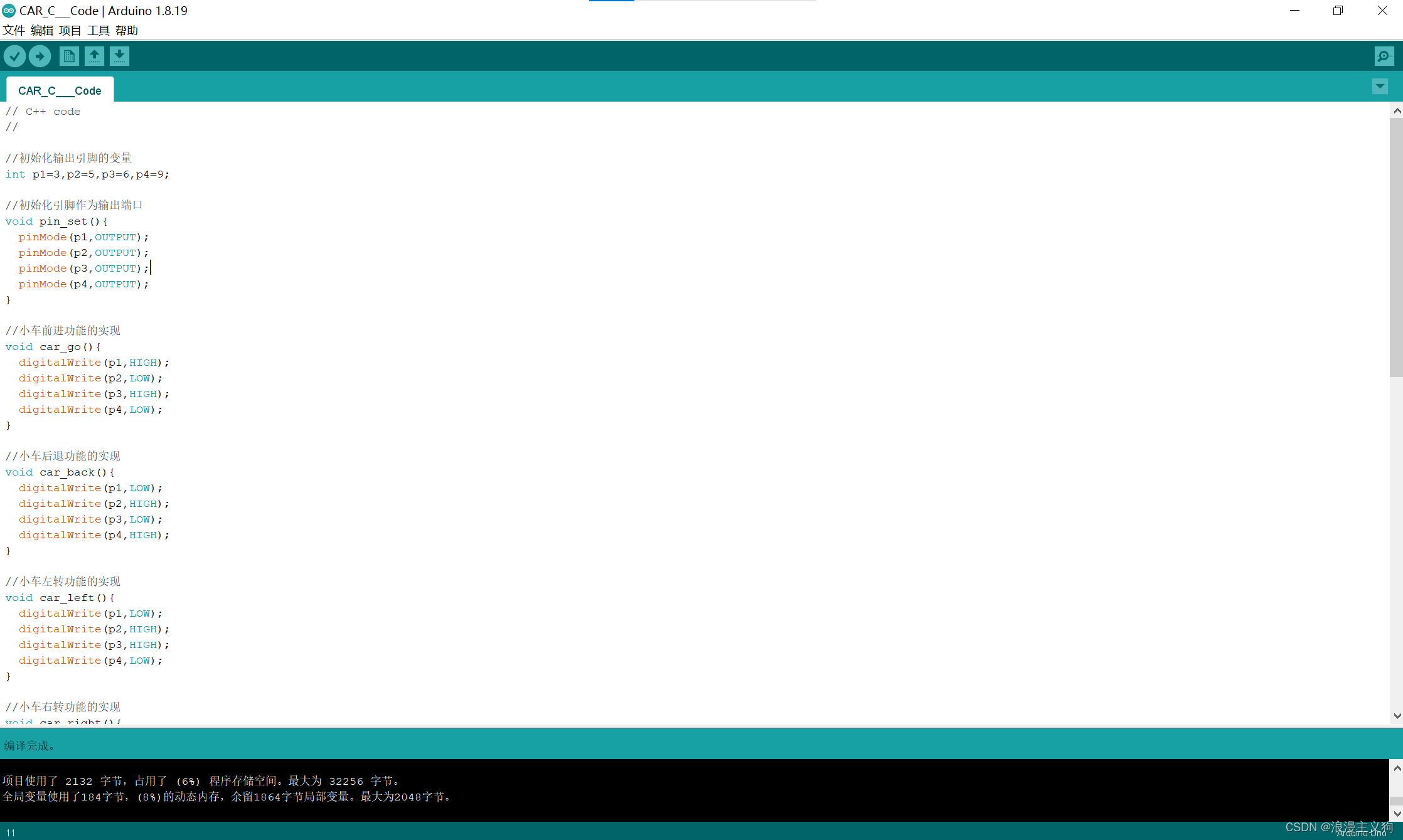
1.2蓝牙小车控制代码环境
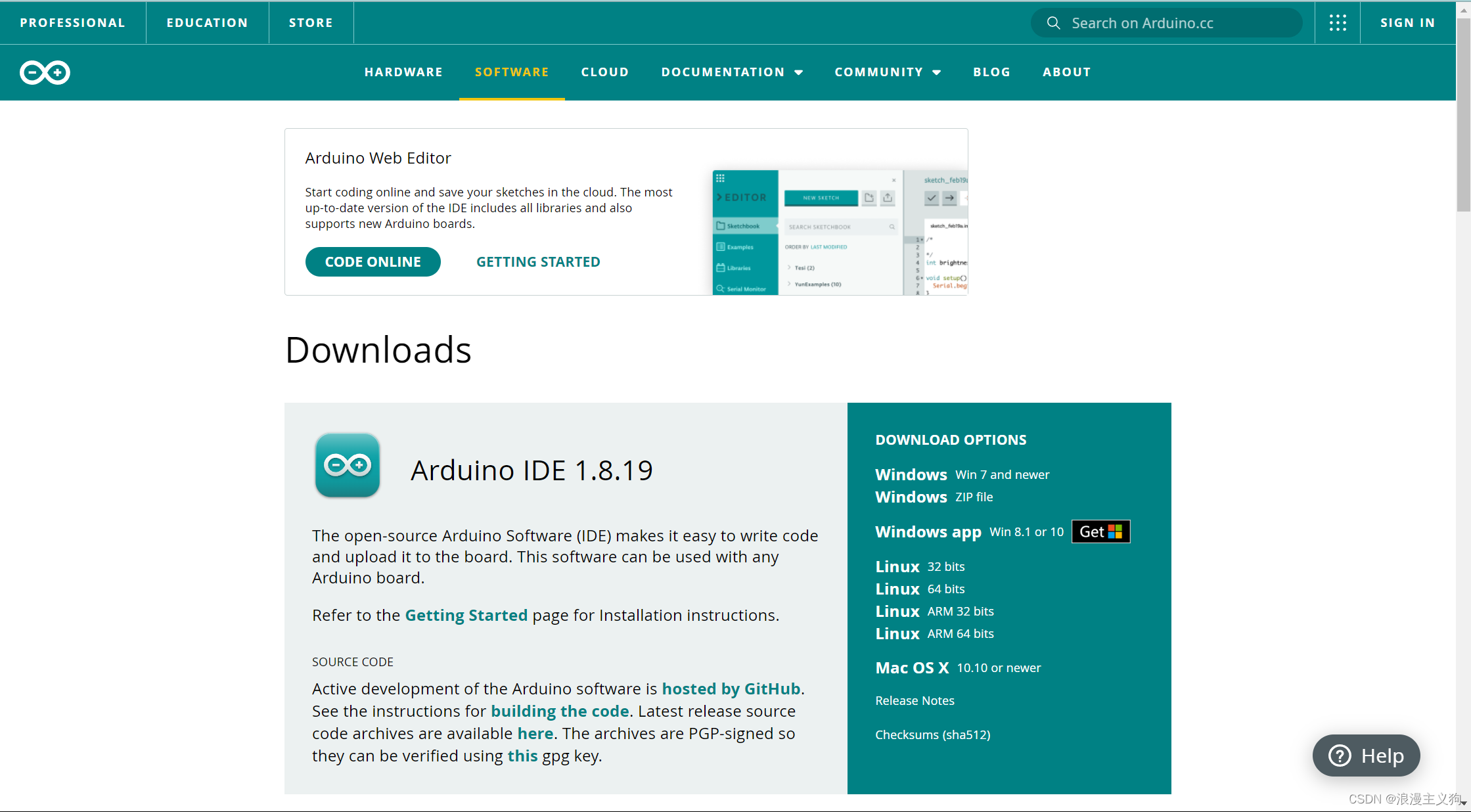
- 使用
Arduino官网的IDE选择对应版本下载即可
Tips
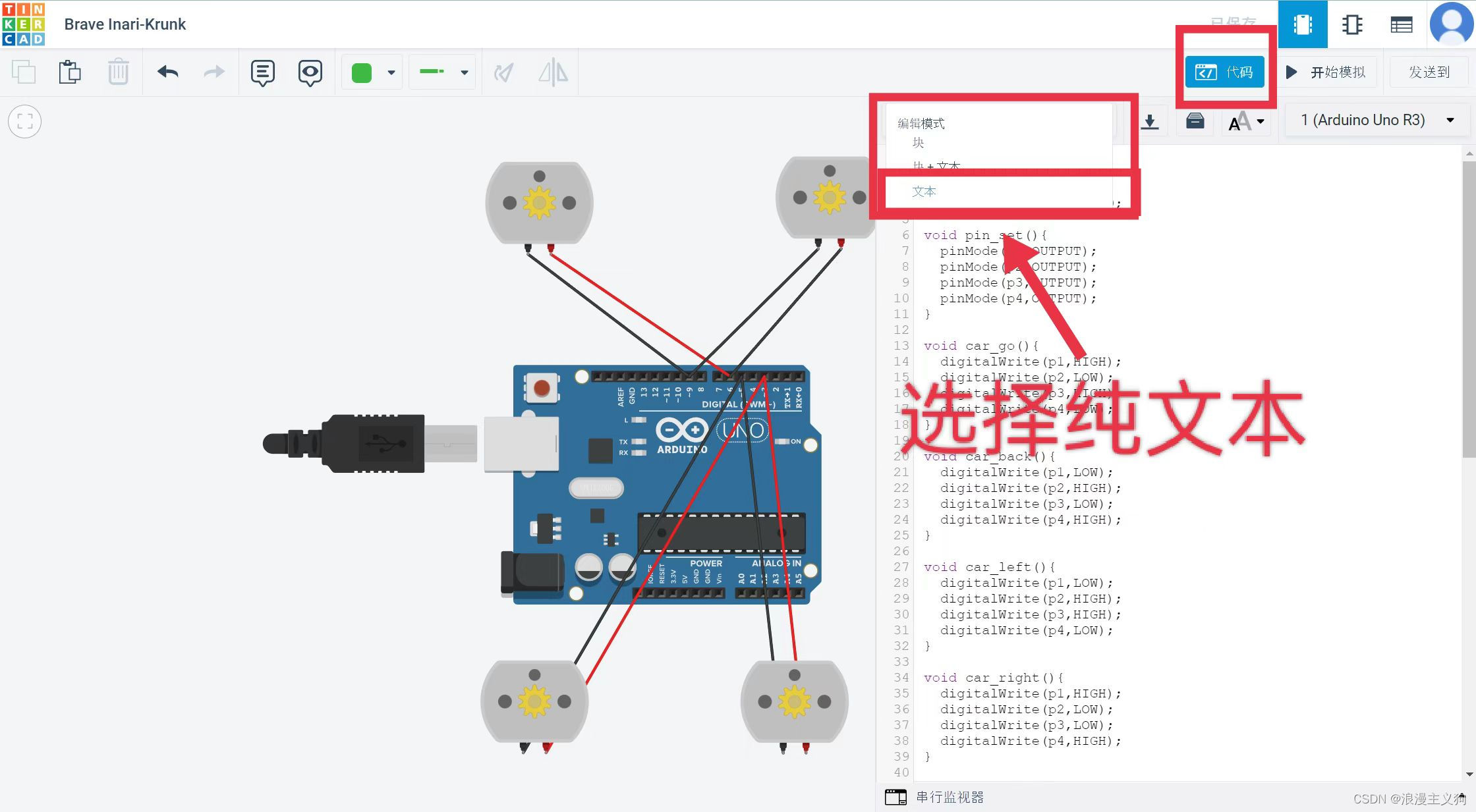
- 在AUTUDESK模拟电路时,可以将代码导入,测试代码的正确性
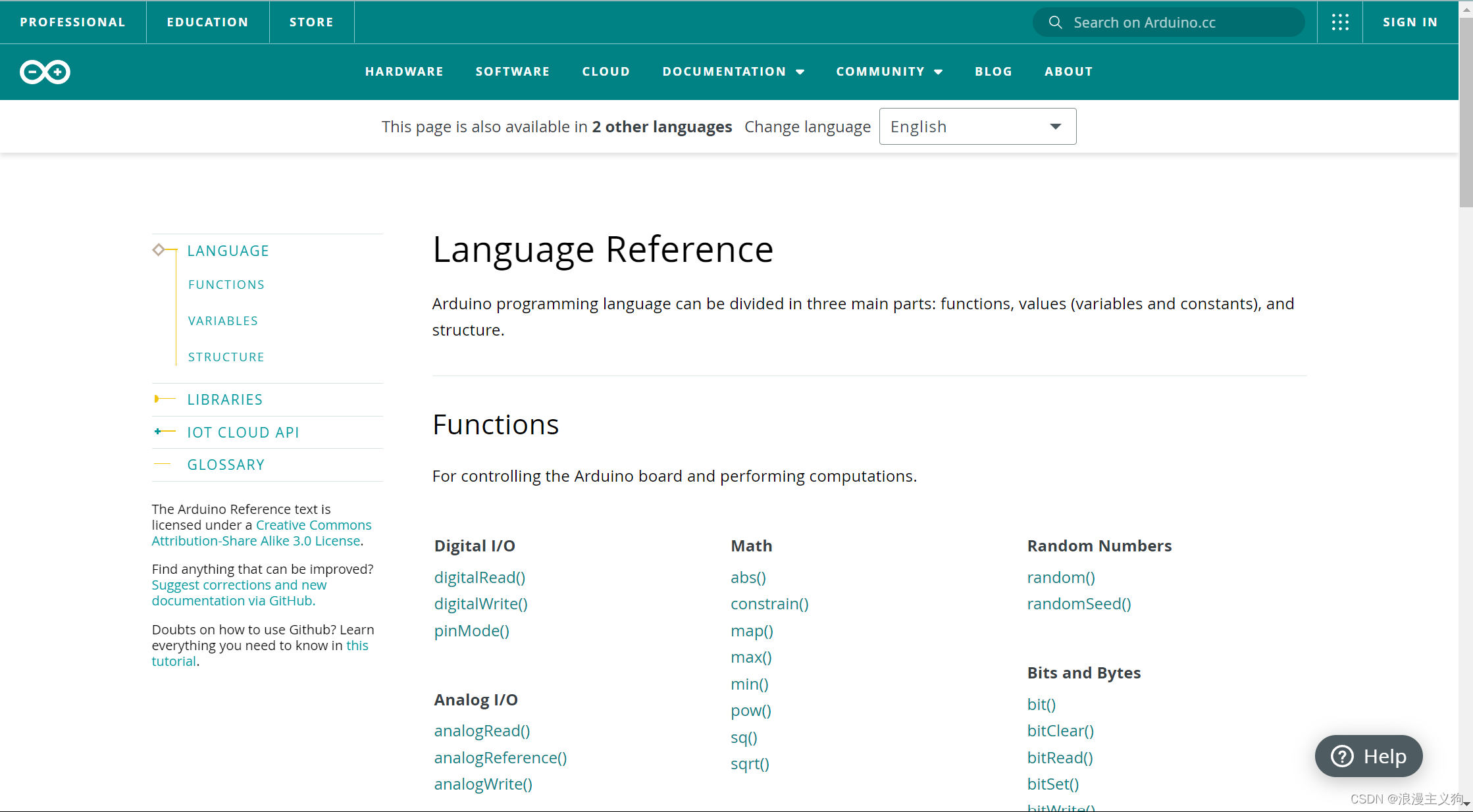
- 基于
Arduion电路板使用不同语言的函数的参考文献 - 对于该项目,我们只需掌握
Digital I/O相关的函数即可
2.Arduino串口通信
2.1 Arduino串口
Arduino采用USART通信模式,可以有硬串口,软串口两种实现方式。
通常将Arduino UNO上自带的串口0(RX)、1(TX)称为硬件串口,可与外围串口设备通信。而使用SoftwareSerial类库模拟成的串口,称为软件模拟串口(简称软串口)。如果要连接更多的串口设备,可以使用软串口。
2.2 系统函数
1、初始化程序
setup()函数中的代码只会被运行一次,通常用来做一下初始化工作;
2、循环主程序
loop()函数中的代码会被无限次地重复运行,程序的主体部分会写在这里;
2.3 串口函数
2.3.1.Serial.begin()
描述:开启串口,通常置于setup()函数中。
原型:
- Serial.begin(speed)
- Serial.begin(speed, config)
参数:
- speed:波特率,一般取值9600,115200等。
- config:设置数据位、校验位和停止位。默认SERIAL_8N1表示8个数据位,无校验位,1个停止位。
返回值:无。
2.3.2.Serial.print()
描述:串口输出数据,写入字符数据到串口。
原型:
- Serial.print(val)
- Serial.print(val, format)
参数:
val:打印的值,任意数据类型。
config:输出的数据格式。BIN(二进制)、OCT(八进制)、DEC(十进制)、HEX(十六进制)。对于浮点数,此参数指定要使用的小数位数。
示例:
Serial.print(78, BIN) 得到 “1001110”
Serial.print(78, OCT) 得到 “116”
Serial.print(78, DEC) 得到 “78”
Serial.print(78, HEX) 得到 “4E”
Serial.print(1.23456, 0) 得到 “1”
Serial.print(1.23456, 2) 得到 “1.23”
Serial.print(1.23456, 4) 得到 “1.2346”
Serial.print(‘N’) 得到 “N”
Serial.print(“Hello world.”) 得到 “Hello world.”返回值:返回写入的字节数。
Serial.println()可以实现换行输出
2.3.3.Serial.available()
描述:判断串口缓冲区的状态,返回从串口缓冲区读取的字节数。
原型:Serial.available()
参数:无。
返回值:可读取的字节数。
2.3.4.Serial.read()
描述:读取串口数据,一次读一个字符,读完后删除已读数据。
原型:Serial.read()
参数:无。
返回值:返回串口缓存中第一个可读字节,当没有可读数据时返回-1,整数类型。
2.4 Digital I/O
2.4.1.digitalRead()
描述:从指定的数字引脚读取值,无论是HIGH还是LOW。
原型:digitalRead(pin)
参数:pin:读取的 Arduino 引脚号
返回值:HIGH或者LOW
示例:
将引脚 13 设置为与引脚 7 相同的值,声明为输入。
int ledPin = 13; // LED connected to digital pin 13
int inPin = 7; // pushbutton connected to digital pin 7
int val = 0; // variable to store the read value
void setup() {
pinMode(ledPin, OUTPUT); // sets the digital pin 13 as output
pinMode(inPin, INPUT); // sets the digital pin 7 as input
}
void loop() {
val = digitalRead(inPin); // read the input pin
digitalWrite(ledPin, val); // sets the LED to the button's value
}2.4.2.digitalWrite()
描述:
将一个HIGH或一个LOW值写入数字引脚。
- 如果引脚已配置为
OUTPUTwithpinMode(),则其电压将设置为相应的值: 5V(或 3.3V 板上的 3.3V)为HIGH, 0V(接地)为LOW。 - 如果引脚配置为
INPUT,digitalWrite()将启用 (HIGH) 或禁用 (LOW) 输入引脚上的内部上拉电阻。建议将 设置pinMode()为INPUT_PULLUP启用内部上拉电阻,参考数字引脚教程。 - 如果不设置
pinMode(),OUTPUT将 LED 连接到引脚,调用 时digitalWrite(HIGH),LED 可能会显得暗淡。没有明确设置pinMode(),digitalWrite()将启用内部上拉电阻,其作用类似于一个大限流电阻。
原型:digitalWrite(pin, value)
参数:
pin:Arduino 引脚号。value:HIGH或LOW.
返回值:无
示例:
//该代码使数字引脚 13 an并通过在和之间以一秒的速度OUTPUT交替来切换它。
void setup() {
pinMode(13, OUTPUT); // sets the digital pin 13 as output
}
void loop() {
digitalWrite(13, HIGH); // sets the digital pin 13 on
delay(1000); // waits for a second
digitalWrite(13, LOW); // sets the digital pin 13 off
delay(1000); // waits for a second
}2.4.3.pinMode()
描述:
将指定的引脚配置为输入或输出。有关引脚功能的详细信息,参考数字引脚页面。
从 Arduino 1.0.1 开始,可以使用 mode 启用内部上拉电阻INPUT_PULLUP。此外,该INPUT模式明确禁用内部上拉。
原型:pinMode(pin, mode)
参数
pin:要设置模式的 Arduino 引脚号。mode:INPUT,OUTPUT或INPUT_PULLUP. 参考数字引脚页面。
返回值:无
示例:
//该代码使数字引脚 13OUTPUT和切换它HIGH和LOW
void setup() {
pinMode(13, OUTPUT); // sets the digital pin 13 as output
}
void loop() {
digitalWrite(13, HIGH); // sets the digital pin 13 on
delay(1000); // waits for a second
digitalWrite(13, LOW); // sets the digital pin 13 off
delay(1000); // waits for a second
}3.制作流程
3.1 电路模拟过程
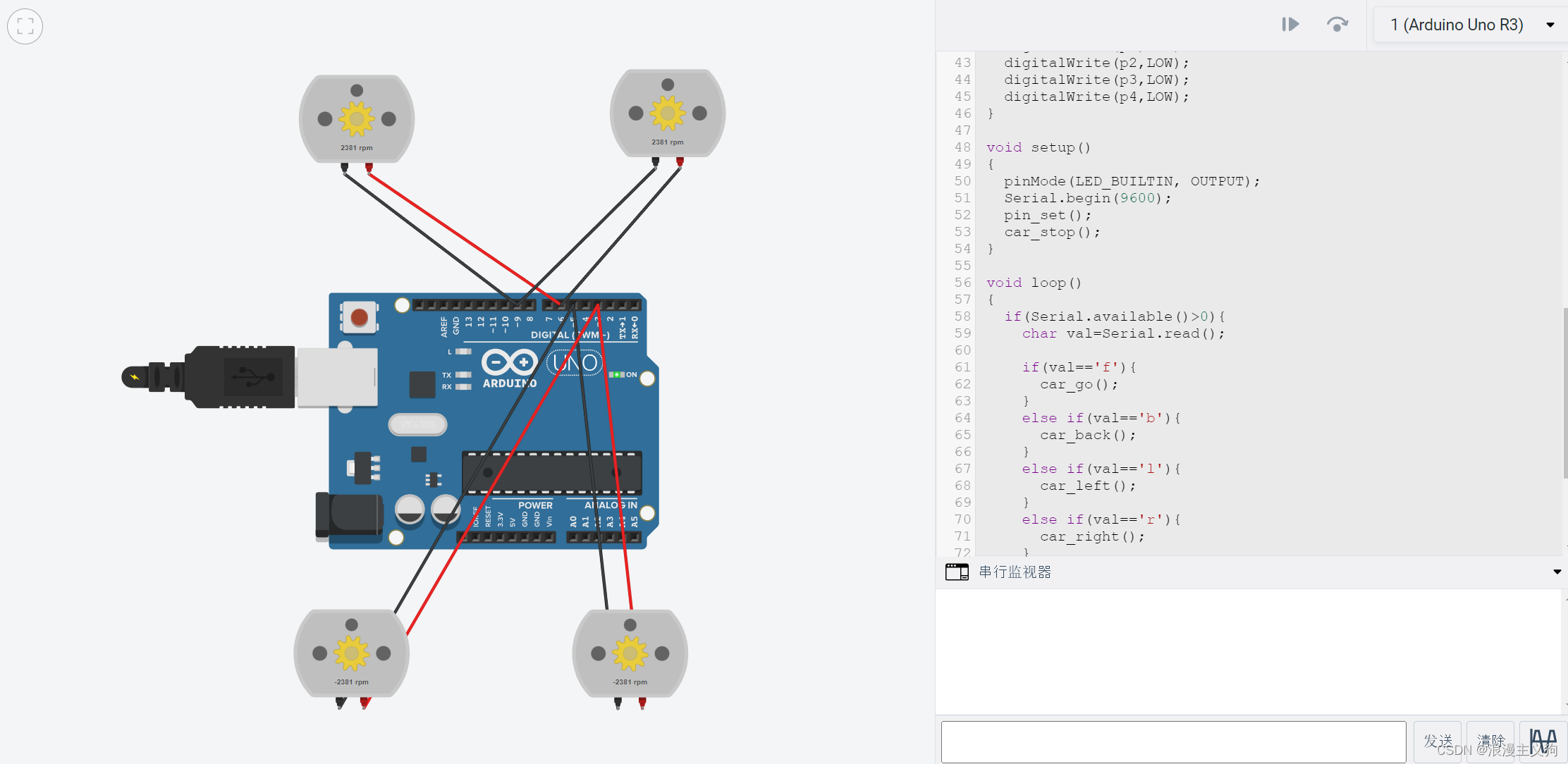
3.1.1 模拟硬件
- 首先,需要在模拟环境中添加一块Arduino电路板
- 其次,需要四个直流电机,用于实现行进及转向控制功能
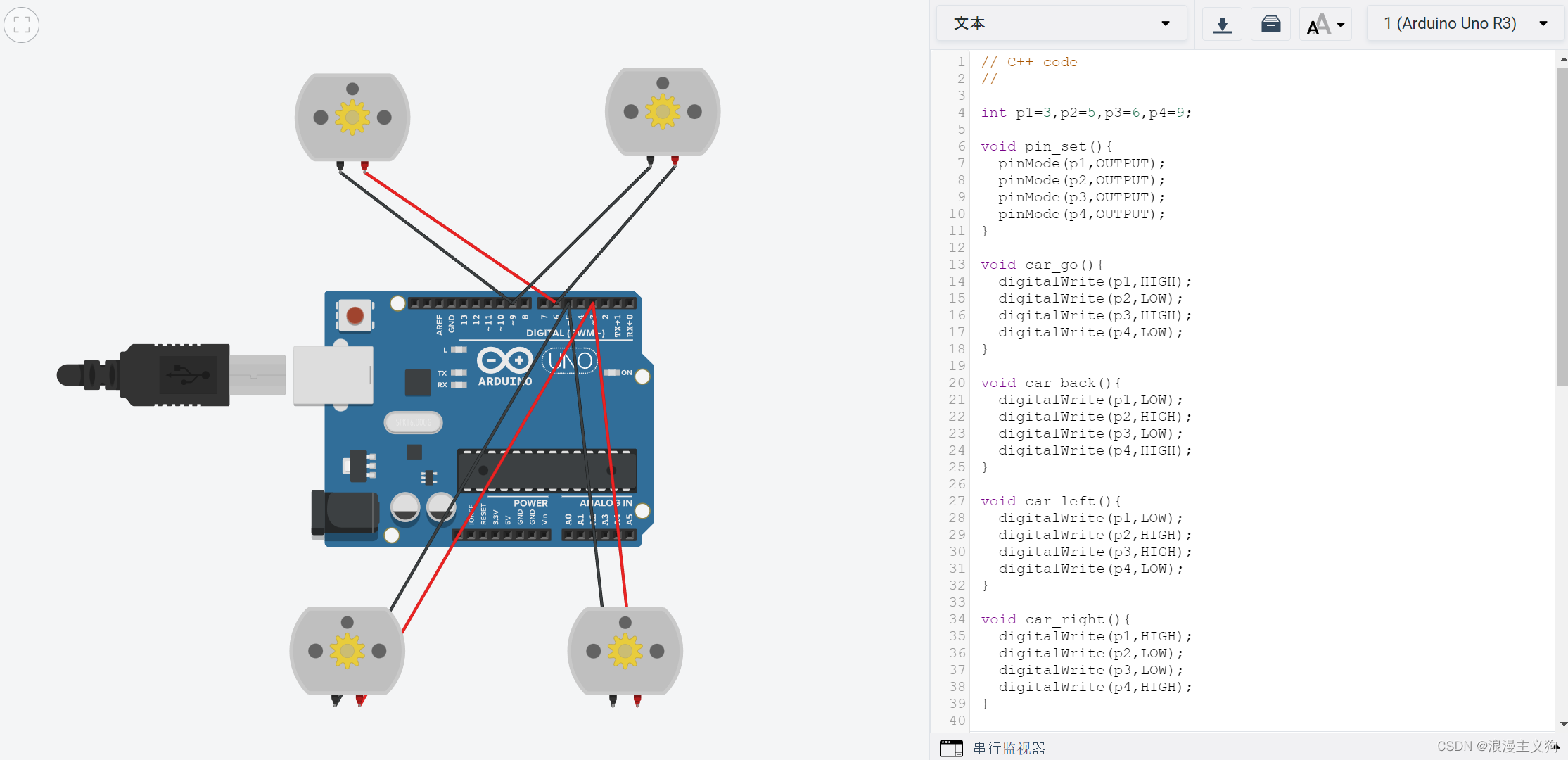
3.1.2 模拟代码
- 可以先在IDE环境中编译,之后导入虚拟环境中模拟
(1). 前进、后退及停止功能
实现该功能,需要控制引脚输出的信号,使得两个引脚在直流电机的接口产生电位差,且要保证四个电机的电位差相等,使得小车可以沿着统一方向行驶,当不存在电位差时,电机停止运作,实现停止功能。
前进代码的实现:
void car_go(){
digitalWrite(p1,HIGH);
digitalWrite(p2,LOW);
digitalWrite(p3,HIGH);
digitalWrite(p4,LOW);
}执行后的结果
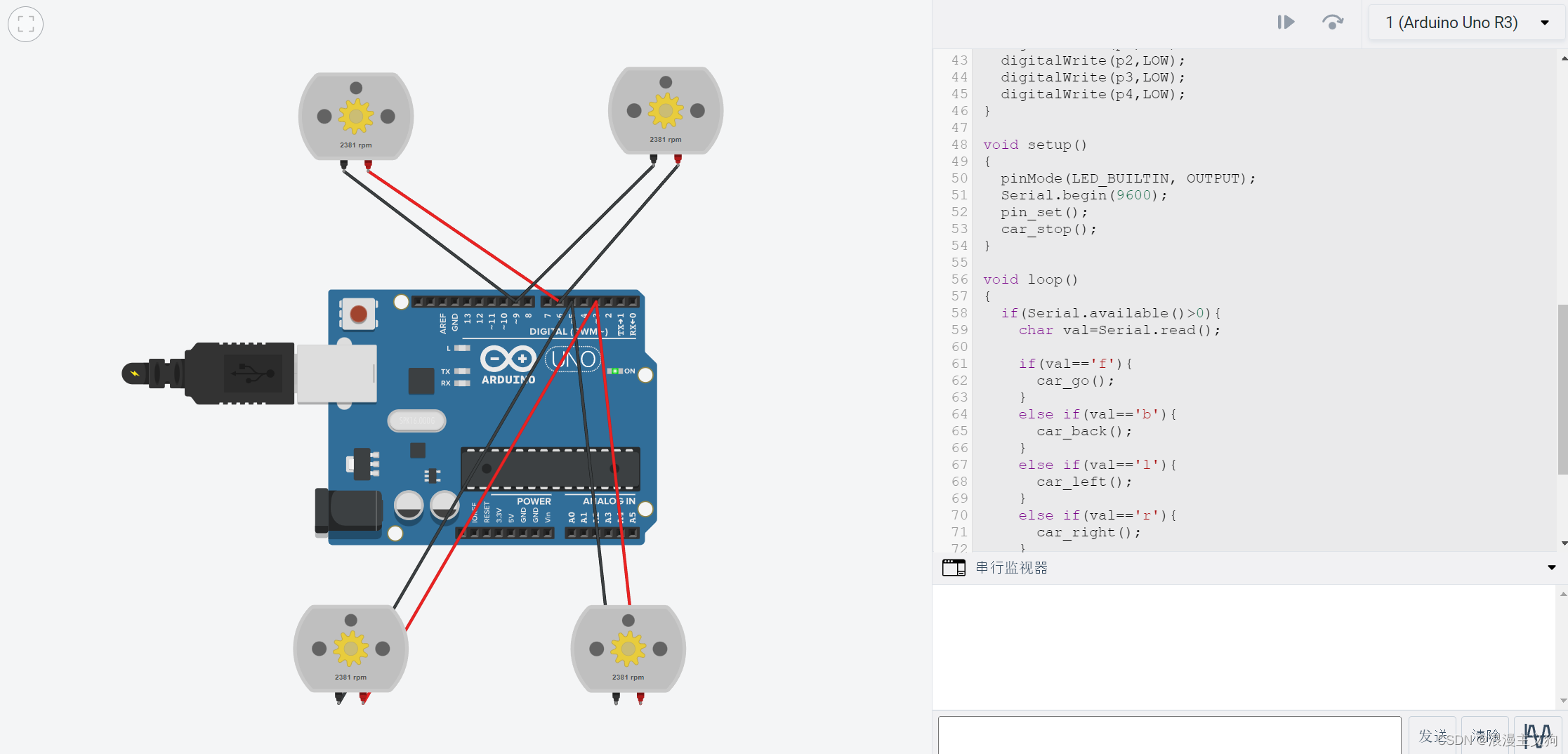
可以看到四个电机均向正方向转动
后退代码的实现
void car_back(){
digitalWrite(p1,LOW);
digitalWrite(p2,HIGH);
digitalWrite(p3,LOW);
digitalWrite(p4,HIGH);
}执行后的结果
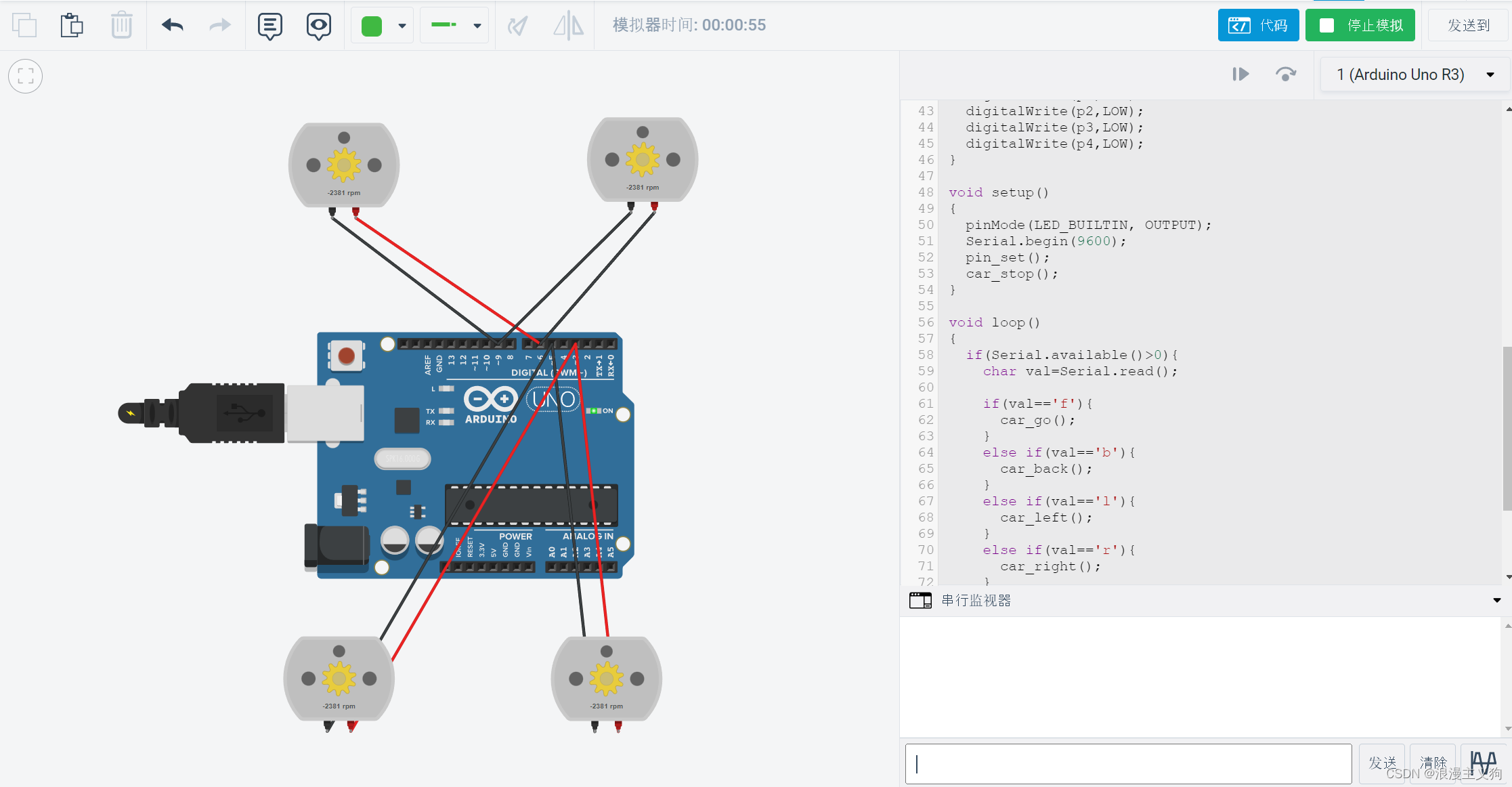
可以看到四个电机均向反方向转动
停止代码的实现
void car_stop(){
digitalWrite(p1,LOW);
digitalWrite(p2,LOW);
digitalWrite(p3,LOW);
digitalWrite(p4,LOW);
}执行后的结果
可以看到四个电机均停止转动
(2). 转向功能
实现小车转向功能,可以控制两侧电机运作方向相反,同侧电机运作方向同步,通过改变引脚的输出信号,可以实现该功能。
小车左转向代码的实现
void car_left(){
digitalWrite(p1,LOW);
digitalWrite(p2,HIGH);
digitalWrite(p3,HIGH);
digitalWrite(p4,LOW);
}执行后的结果
可以看到上方同侧电机正向转动,下方同侧电机反向转动
小车右转向代码的实现
void car_right(){
digitalWrite(p1,HIGH);
digitalWrite(p2,LOW);
digitalWrite(p3,LOW);
digitalWrite(p4,HIGH);
}执行后的结果

可以看到上方同侧电机反向转动,下方同侧电机正向转动
(3). HC-06蓝牙模块链接功能
对Arduino链接HC-06蓝牙模块后,在启动时需要对串口进行链接
链接图
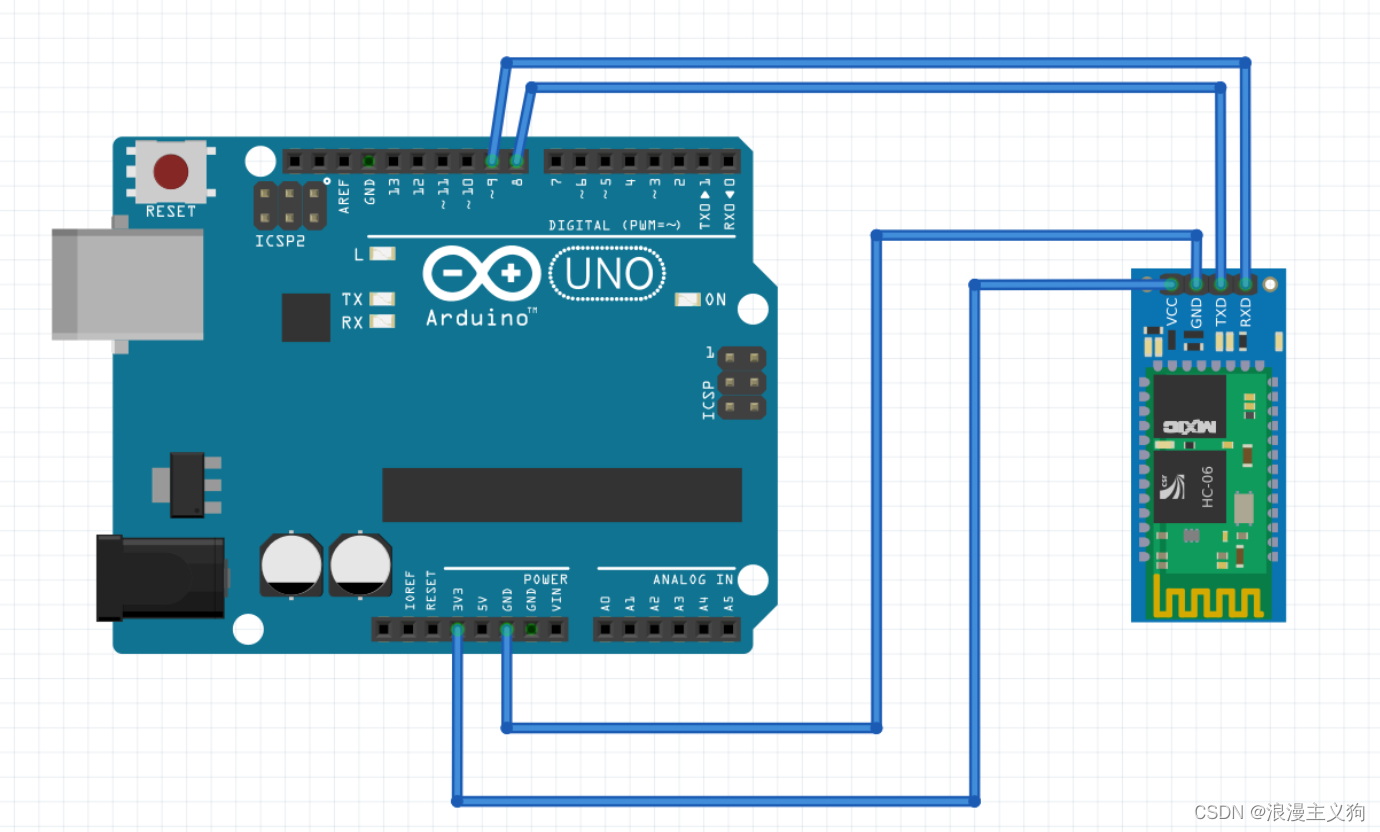
代码调试
#include <SoftwareSerial.h>
SoftwareSerial BT(8, 9); //新建对象,接收脚为8,发送脚为9
char val1; //存储接收的变量
void setup() {
Serial.begin(9600); //与电脑的串口连接
Serial.println("BT is ready!");
BT.begin(9600); //设置蓝牙模块波特率
}
void loop() {
//如果串口接收到数据,就输出到蓝牙串口
if (Serial.available()) {
val 1= Serial.read();
BT.print(val1);
}
//如果接收到蓝牙模块的数据,输出到屏幕
if (BT.available()) {
val1 = BT.read();
Serial.print(val1);
}
}(4). 蓝牙模块数据处理功能
当通过蓝牙向小车板载的HC-06蓝牙模块发出信号时,小车需要对接收到的蓝牙信号进行处理,以实现对小车的控制
小车蓝牙信息处理代码的实现
if(Serial.available()>0){ //当接收信号的返回值大于0时说明接收到了信号
char val=Serial.read(); //读入接收的信号值
if(val=='f'){ //当信号为’f’时,执行前进的代码
car_go();
}
else if(val=='b'){ //当信号为’b’时,执行后退的代码
car_back();
}
else if(val=='l'){ //当信号为’l’时,执行左转的代码
car_left();
}
else if(val=='r'){ //当信号为’r’时,执行右转的代码
car_right();
}
else{ //当信号非法时,执行停止的代码
car_stop();
}
}3.2 3D建模过程
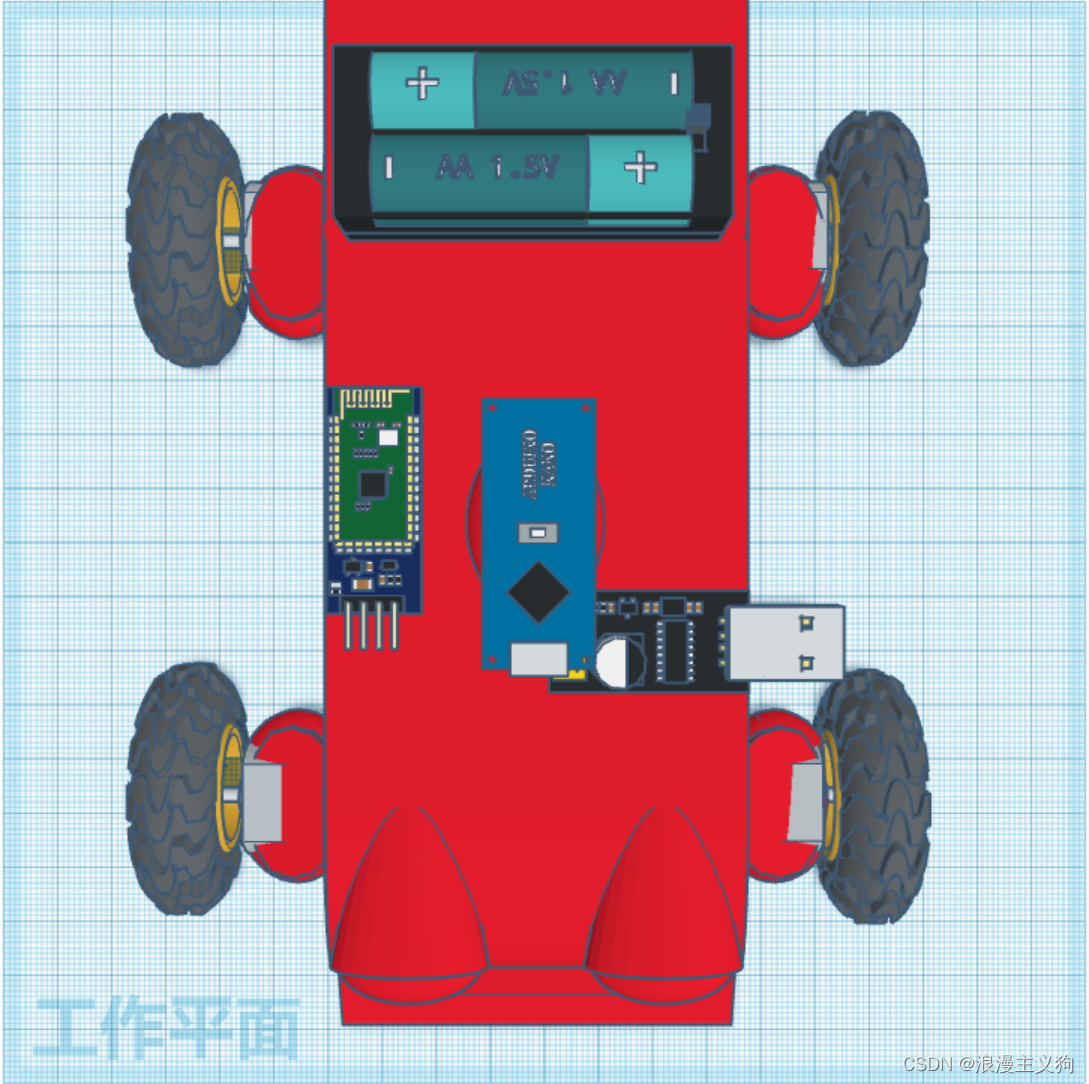
3.2.1 模型选择
- 根据个人风格的不同,选择内置库中自己喜欢的模型组合即可,以下是我的建模成品图
主视图
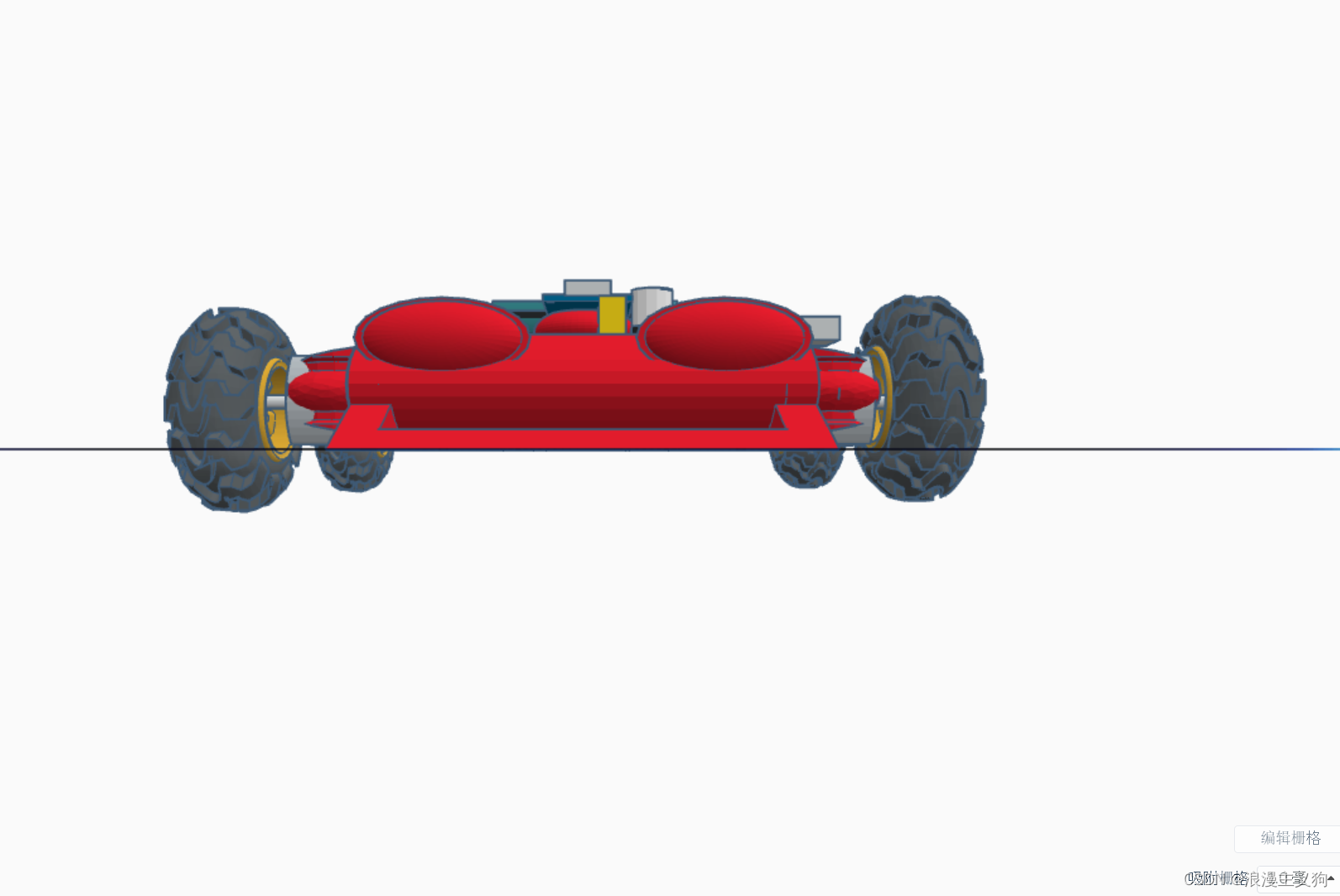
左视图

俯视图
3.3 焊接过程
- 推荐看我好基友的这篇优质详解大一专业认知实习
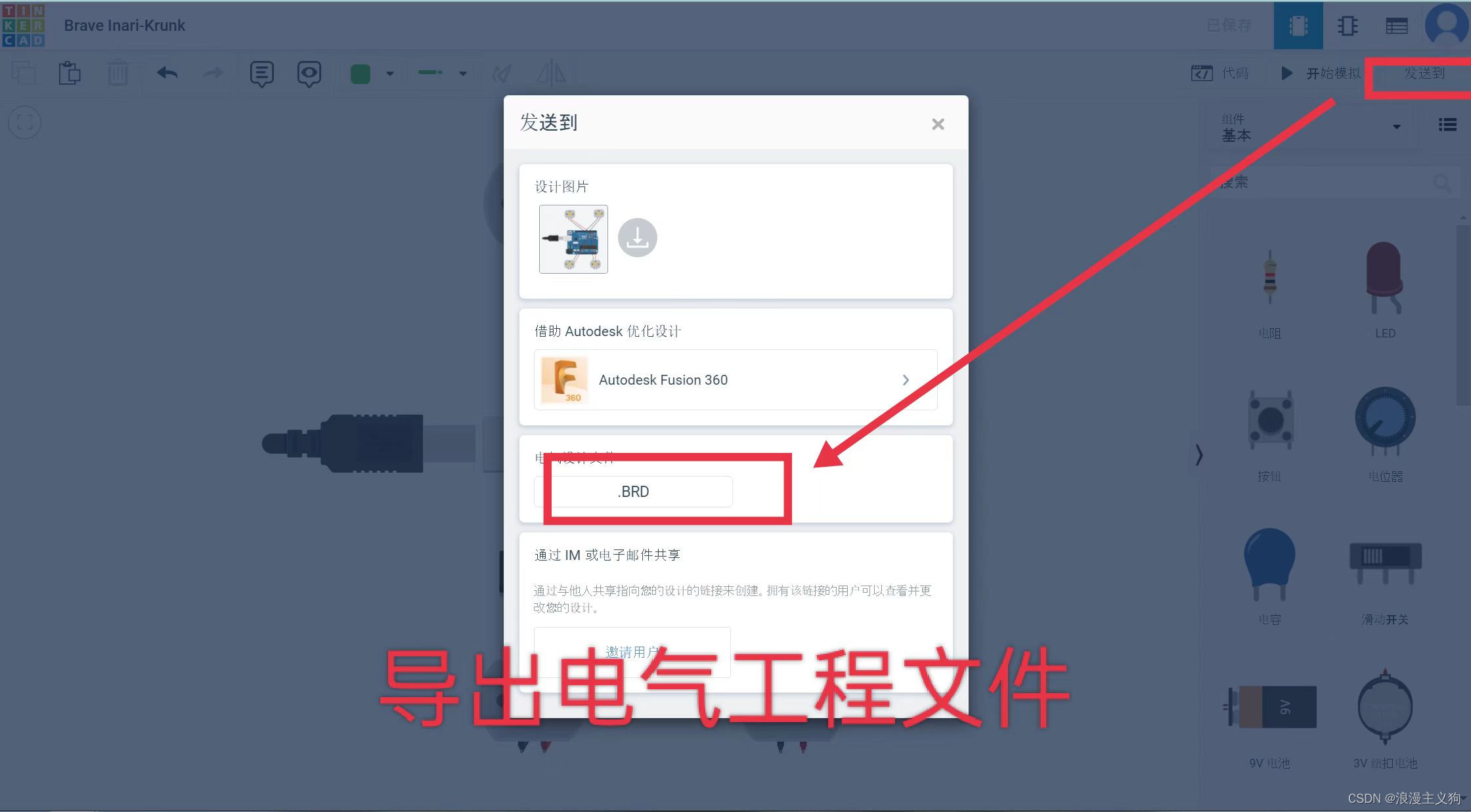
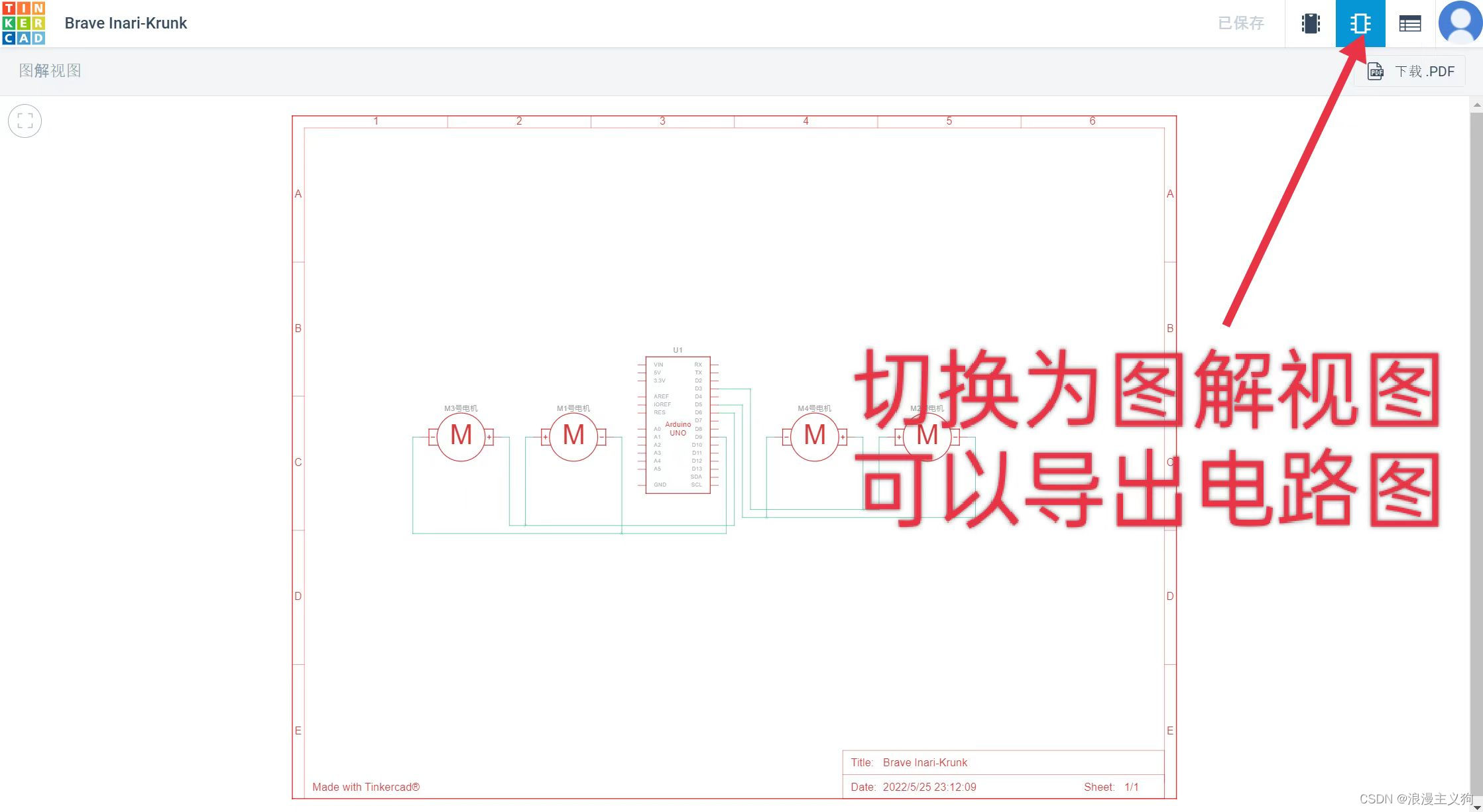
4.成果导出
4.1 导出电路图
4.2 导出3D建模

评论
Deprecated: preg_replace(): Passing null to parameter #3 ($subject) of type array|string is deprecated in /var/www/html/wp-content/themes/argon/functions.php on line 1748